PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的专业性高新技术企业。公司资力厚、技术先进,产品远销泰国、越南、菲律宾等东南亚国家和地区。

自有软件专利通过知识体系贯标认证,高新技术企业自主研发团队,可根据客户需求非标定制。获得各项专利30余项。

您可以第一时间了解到PG电子的最新动态,与您分享行业的最热资讯,时刻在为您服务。在焊接通用设备、焊接结构件、工装夹具、焊接自动化设备及控制方面积累了丰富的实践经验。
秉持着“树立一种优质形象:优质服务是生命,客服满意是目的”的经营理念,实施差异化战略,在细分市场发力,为客户提供高品质的工业机器人和智能制造解决方案。PG电子工业机器人一直倾心打造好的品质,竭力追求贴心的服务。
PG电子工业机器人有限公司
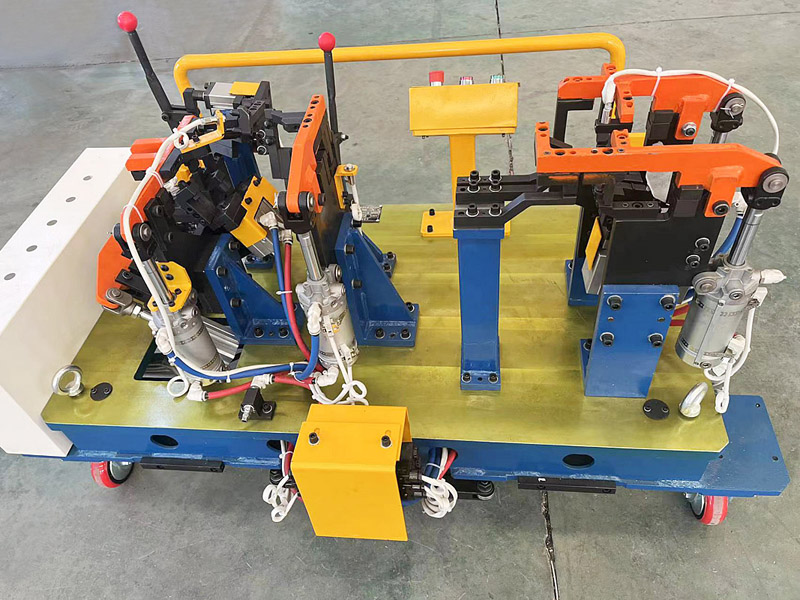
PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的 专业性高新技术企业。公司主要产品有OTC焊接机器人、OTC焊机,焊接机,工装,夹具,检具,非标自动化焊接设备、机器人应用系统等,
发布:2025-04-11 浏览:440
### 工(gōng)业(yè)机(jī)器(qì)人(rén)路径规(guī)划(huà)算(suàn)法(fǎ)🍅

工(gōng)业(yè)机(jī)器(qì)人(rén)路径规(guī)划(huà)算(suàn)法(fǎ)是(shì)机(jī)器(qì)人(rén)技(jì)术(shù)中(zhōng)的(de)核(hé)心(xīn)组(zǔ)成(chéng)部(bù)分(fēn),它(tā)决(jué)定(dìng)了(le)机(jī)器(qì)人(rén)如(rú)何(hé)在(zài)给(gěi)定(dìng)的(de)工(gōng)作(zuò)空(kōng)间(jiān)内(nèi),从(cóng)起(qǐ)始(shǐ)点(diǎn)高(gāo)效(xiào)地(de)移(yí)动(dòng)到(dào)目(mù)标(biāo)点(diǎn),同(tóng)时(shí)避(bì)开(kāi)所(suǒ)有(yǒu)障(zhàng)碍(ài)物(wù)。这(zhè)一(yī)技(jì)术(shù)不(bù)仅(jǐn)在(zài)工(gōng)业(yè)生(shēng)产(chǎn)线(xiàn)上(shàng)发(fā)挥(huī)着(zhe)关键作(zuò)用(yòng),还(hái)在(zài)自(zì)动(dòng)驾(jià)驶(shǐ)、物(wù)流(liú)配(pèi)送(sòng)等(děng)领(lǐng)域展(zhǎn)现(xiàn)出(chū)广(guǎng)泛(fàn)的(de)应(yīng)用(yòng)前(qián)景(jǐng)。本(běn)文将(jiāng)深(shēn)入(rù)探(tàn)讨(tǎo)工(gōng)业(yè)机(jī)器(qì)人(rén)路径规(guī)划(huà)算(suàn)法(fǎ)的(de)几(jǐ)个(gè)主要(yào)点(diǎn),结(jié)合(hé)最(zuì)新(xīn)相(xiāng)关热(rè)点(diǎn)话(huà)题(tí),为(wèi)读(dú)者(zhě)提(tí)供(gōng)有(yǒu)价(jià)值(zhí)的(de)信(xìn)息(xi)和(hé)深(shēn)度(dù)分(fēn)析(xī)。
路径规(guī)划(huà)是(shì)指(zhǐ)在(zài)给(gěi)定(dìng)的(de)工(gōng)作(zuò)空(kōng)间(jiān)内(nèi),不(bù)考(kǎo)虑(lǜ)时(shí)间(jiān)因(yīn)素(sù),寻(xún)找(zhǎo)一(yī)条(tiáo)从(cóng)起(qǐ)始(shǐ)点(diǎn)到(dào)目(mù)标(biāo)点(diǎn)的(de)可(kě)行(xíng)路径。这(zhè)里(lǐ)的(de)“可(kě)行(xíng)”意(yì)味(wèi)着(zhe)路径必(bì)须(xū)是(shì)无(wú)碰(pèng)撞(zhuàng)的(de),即(jí)路径上(shàng)的(de)任(rèn)何(hé)点(diǎn)都(dōu)不(bù)能(néng)与(yǔ)环(huán)境(jìng)中(zhōng)的(de)障(zhàng)碍(ài)物(wù)发(fā)生(shēng)碰(pèng)撞(zhuàng)。路径规(guī)划(huà)的(de)主要(yào)目(mù)标(biāo)是(shì)为(wèi)机(jī)器(qì)人(rén)找(zhǎo)到(dào)一(yī)条(tiáo)安(ān)全、可(kě)行(xíng)的(de)运动路径,使其能够从起🔑始位置到达目标位置,同时避开所有障碍物。这一过程中,机器人工作空间的环境地图通常以栅格地图、拓扑地图或特征地图等形式表示,其中包含障碍物的位置和形状信息。
工业机器人路径规划算法种类繁多,根据不同的应用场景和环境表示方法,可以选择不同的算法。以下介绍几种常见的路径规划算法:1. **基于图搜索的算法**:这类算法将工作空间离散化成图结构,然后在图上搜索最优路径。例如,Dijkstra算法是一种经典的广度优先搜索算法,用于寻找图中单源最短路径。A*算法则是Dijkstra算法的改进版本,它引入了启发式函数来引导搜索方向,从而提高搜索效率。A*算法在保证找到最优路径的前提下,比Dijkstra算法更高效,是机器人路径规划中最常用的算法之一。2. **基于采样的算法**:这类算法不显式地构建工作空间的完整地图,而是通过在工作空间中随机采样,然后连接采样点来构建路径。概率路图法(PRM)和快速扩展随机树算法(RRT)是这类算法的代表。PRM算法预先在工作空间中随机采样大量的点,并连接附近的点,构建一个概率路图。RRT算法则从起始点开始,通过随机采样和扩展的方式,快速构建一棵搜索树,直到树扩展到目标点附近。这类算法特别适用于高维空间和复杂环境。3. **其他路径规划算法**:除了上述算法,还有一些其他的路径规划算法,如基于势场的算法、Voronoi图法等。这些算法各有优缺点,适用于不同的场景。
路径规划算法在工业机器人领域有着广泛的应用。例如,在自动化生产线上,机器人需要快速且准确地从物料架取料并放置到加工设备上,这就需要高效的路径规划算法来确保机器人的运动路径最优且安全。然而,在实际应用中,路径规划算法也面临着诸多挑战。一方面,随着工作空间复杂度的增加,路径规划算法的计算量也会急剧上升。特别是在大型地图或高维空间中,算法的搜索效率会显著下降。另一方面,环境中的障碍物位置和形状可能会发生变化,这就要求路径规划算法能够适应动态环境的变化,实时更新路径。此外,机器人自身的动力学约束(如最大速度、最大加速度等)也会对路径规划产生影响,需要在算法设计中予以考虑。针对这些挑战,研究者们提出了许多改进方法。例如,采用启发式搜索算法来减少搜索节点数量,提高搜索效率;利用迁移学习和多任务学习等方法来加速模型的收敛,减少训练时间和资源消耗;以及引入增量奖励调整模型和微调策略优化模型等,以实现路📀PG电子官网径的优化和全局最优策略的求解。
近年来,随着人工智能和机器学习技术的不断发展,端到端学习在移动机器人路径规划中的应用成为了一大热点。这种方法直接从传感器输入到行为输出进行学习,无需显式建模环境或规划中间步骤。端到端路径规划能够显著提高机器人的自主导航能力,使其在复杂环境中更加灵活和智能。此外,集群规划也是当前研究的一个重点方向。在集群规划中,多个机器人需要协同工作,完成复杂任务。这要求机器人之间有高效的通信机制和协调策略,以避免碰撞、优化整体路径和任务分配。集中式轨迹规划和分布式避碰控制等技术的结合,为解决这一问题提供了新思路。展望未来,随着技术的不断进步和应用场景的持续拓展,工业机器人路径规划算法将会更加智能化和高效化。一方面,深度学习等先进技术的引入将进一步提升算法的性能和适应性;另一方面,跨学科融合和创新也将推动路径规划算法在更多领域实现广泛应用和深入发展。
综上所述,工业机器人路径规划算法是机器人技术中的关键组成部分。通过深入了解这一领域的核心概念和🆕PG电子官网常见算法,我们可以更好地把握其发展趋势和应用前景。同时,面对实际应用中的挑战和热点问题,我们也需要不断探索和创新,以推动这一技术的持续进步和发展。

12-10 2025
1. 工业机器人培训新选择
发布:2025-12-10
12-10 2025
今日科普|工业机器人操作指南
提到工业机器人,很多人脑海中🈸PG电子官网会浮现出科幻电影里机械臂精准焊接、搬运的场景。但你知道吗?这些“钢铁猛兽”早已渗透到我们生活的方方面面——从汽车制造到3C电子,从物流仓储到医疗手术,甚至在2025年爆火的人形机器人热潮中,工业机器人技术仍是底层核心。根据国际机器人联合会(IFR)最新数据,2025年中国工
发布:2025-12-10
12-08 2025
知名工业机器人品牌盘点
说到工业机器人,很多人第一反应可能是汽车工厂里“咔咔”焊接的机械臂,或是物流仓库里“嗖嗖”搬运货物的移动底盘。但你知道吗?2025年的工业机器人早已不是“只会重复动作的铁疙瘩”,而是能自主决策、灵活适应、甚至能“看懂”复杂场景的“智能助手”。根据麦肯锡《全球工业自动化发展白皮书》,2025年人形机器人的🈁PG电子官网场
发布:2025-12-08

12-08 2025
今日科普|中国工业机器人发展路
如果用一句话形容中国工业机器人的发展,那一定是“十年狂飙,一朝蜕变”。从2025年产量3.3万台到2025年55.64万台,10年增长超15倍——这组数据背后,是中国从“世界工厂”向“智造强国”的跨💟PG电子官网越。但更值得关注的是,2025年行业增速依然强劲:前5个月全国高技术制造业增加值同比增长9.5%,工业机器人
发布:2025-12-08
12-08 2025
工业机器人技术新突破
2025年11月,上海某汽车工厂里,一台六轴工业机器人正用机械臂抓取零件进行焊接。与传统机器人需要提前编程不同,这台机器人通过具身智能技术,在操作过程中实时感知环境变化,自主调整焊接角度和力度——这背后是全球首个具身智能机器人真机强化学习技术的突破。这项技术让机器人学习新技能的时间从数小时缩短至十几分钟,任务完成率达到100%,且性能全程不降级。举个例子,传统机器人焊接汽车底盘时,若零件尺寸偏差1
发布:2025-12-08

12-08 2025
工业机器人技术新发展
在深圳某新能源汽车工厂里,12台协作机器人正与工人并肩作业,它们不仅能精准识别零件型号,还能通过力反馈系统感知人类操作力度,实现“你抬我扶”的默契配合。这不是科幻电影场景,而是2025年中国制造业的真实写🍎PG电子官网照。据国际机器人联合会最新数据,中国工业机器人密度已达每万名工人470台,超越德国、日本跃居全球第三,
发布:2025-12-08