PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的专业性高新技术企业。公司资力厚、技术先进,产品远销泰国、越南、菲律宾等东南亚国家和地区。

自有软件专利通过知识体系贯标认证,高新技术企业自主研发团队,可根据客户需求非标定制。获得各项专利30余项。

您可以第一时间了解到PG电子的最新动态,与您分享行业的最热资讯,时刻在为您服务。在焊接通用设备、焊接结构件、工装夹具、焊接自动化设备及控制方面积累了丰富的实践经验。
秉持着“树立一种优质形象:优质服务是生命,客服满意是目的”的经营理念,实施差异化战略,在细分市场发力,为客户提供高品质的工业机器人和智能制造解决方案。PG电子工业机器人一直倾心打造好的品质,竭力追求贴心的服务。
PG电子工业机器人有限公司
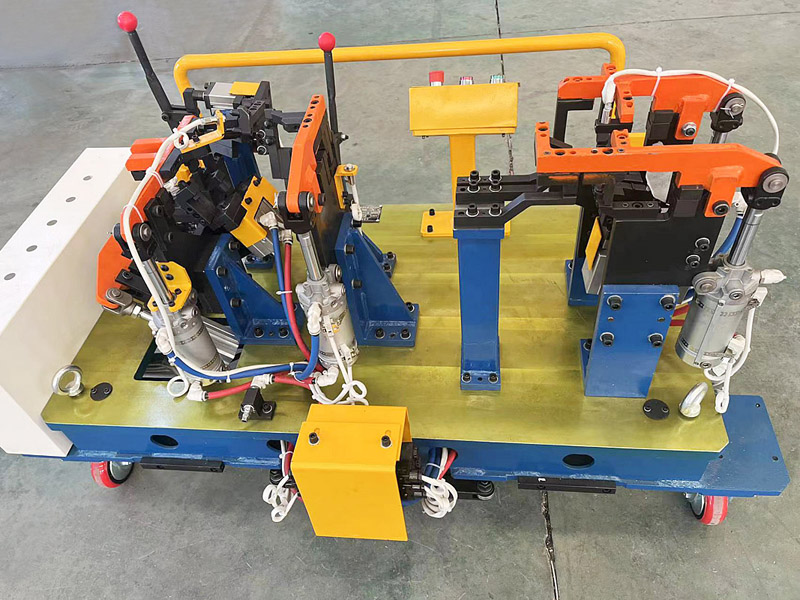
PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的 专业性高新技术企业。公司主要产品有OTC焊接机器人、OTC焊机,焊接机,工装,夹具,检具,非标自动化焊接设备、机器人应用系统等,
发布:2025-05-31 浏览:390
图5 运动模型经分析可得如下关系式:以矩阵方式表示如下:以上是机器人在自身坐标系下的运动学方程,实际应用中还需要转换为世界坐标系,图5 中机器人自身坐标与世界坐标的夹角为α。假设机器人在世界坐标系的速度和角...通过LabVIE🍆W Robotics Steering 模块提供的移动机器人运动学解算算法。通过配置轮式结构实现快速搭建框...配置完底盘控制框架后,我们将配置框架、逆运动学解算、正运动学解算以及电机速度环连接起来。正运动学通过电机编码器解算出当前机器人在机体坐标系下。

的迅速发展及其在工业、军事等领域中的广泛应用,有关智...用Simulink公共模块库中的模块建立运动学仿真模型。但当机器人的运动学方程较复杂时,这种方法就显得繁琐。简便的方法是采用基于MATLAB函数的运动学仿真,这种方法主要通过用MATLAB语言编写MATLAB函数,来求解机器人的运动学方程和逆运动学方程,从而建立机器人的运动🌟PG电子官网学仿真模型。 图4基于MATLAB函数的运动学仿真模型 基于MATLAB函数的智能机器人的运动学仿真模型如图4所示,并编制了求解运动学方程函数以和求。
2.4.1引进齐次坐标342.4.2将复合变换式改写为齐次变换式342.4.3绕坐标轴旋转的3个特殊齐次变换矩阵352.4.4齐次旋转矩阵和平移矩阵352.4.5齐次变换矩阵的特点362.5工业机器人运动学建立思路362.6坐标变换应用举例372.6.1机器人与环境之间的坐标变换372.6.2摄像机的坐标系与坐标的变换37本章小结39思考与练习题39参考文献40第3章机器人运动学413.1连杆参数和连杆坐标系413.1.1机器人连杆和关节的概念413.1.2连杆参数413.1。
二、工业机器人成本结构及关键零部件要找到影响精度和负载的原因,首先需要拆解工业机器人工作的原理。整个工业机器人的运动控制的流程为:📞1)当上位机发送一个运动命令时,控制器会接收到这个命令并开始计算相应的电机控制信号。2)控制器向伺服电机输出正确的电源信号,使电机按指定的速度和方向旋转。3)伺服电机通过自身的高精度特性,结合控制器的闭环控制,确保输出轴按计划轨迹运动。4)减速器则将伺服电机高速旋转的较低扭矩,转化为适合负载要求的低速大扭矩输出。同时,减速器内的位置反馈信号,也会通。
控制:在最优控制中,Hessian矩阵帮助优化控制输入。参数估计:用于估计机器人模型参数。5. 数值方法 若解析计算复杂,可使用数值方法近似计算Hessian矩阵: H i j ≈ f ( x + e i h + e j h ) − f ( x + e i h ) − f ( x + e j h ) + f ( x ) h 2 \mathbf{H}_{ij} \approx \frac{f(\mathbf{x} + \mathb🆖PG电子官网f{e}_i h + \mathbf{e}_j 。

12-10 2025
1. 工业机器人培训新选择
发布:2025-12-10
12-10 2025
今日科普|工业机器人操作指南
提到工业机器人,很多人脑海中🈴PG电子官网会浮现出科幻电影里机械臂精准焊接、搬运的场景。但你知道吗?这些“钢铁猛兽”早已渗透到我们生活的方方面面——从汽车制造到3C电子,从物流仓储到医疗手术,甚至在2025年爆火的人形机器人热潮中,工业机器人技术仍是底层核心。根据国际机器人联合会(IFR)最新数据,2025年中国工
发布:2025-12-10
12-08 2025
知名工业机器人品牌盘点
说到工业机器人,很多人第一反应可能是汽车工厂里“咔咔”焊接的机械臂,或是物流仓库里“嗖嗖”搬运货物的移动底盘。但你知道吗?2025年的工业机器人早已不是“只会重复动作的铁疙瘩”,而是能自主决策、灵活适应、甚至能“看懂”复杂场景的“智能助手”。根据麦肯锡《全球工业自动化发展白皮书》,2025年人形机器人的🈶PG电子官网场
发布:2025-12-08

12-08 2025
今日科普|中国工业机器人发展路
如果用一句话形容中国工业机器人的发展,那一定是“十年狂飙,一朝蜕变”。从2025年产量3.3万台到2025年55.64万台,10年增长超15倍——这组数据背后,是中国从“世界工厂”向“智造强国”的跨🏆PG电子官网越。但更值得关注的是,2025年行业增速依然强劲:前5个月全国高技术制造业增加值同比增长9.5%,工业机器人
发布:2025-12-08
12-08 2025
工业机器人技术新突破
2025年11月,上海某汽车工厂里,一台六轴工业机器人正用机械臂抓取零件进行焊接。与传统机器人需要提前编程不同,这台机器人通过具身智能技术,在操作过程中实时感知环境变化,自主调整焊接角度和力度——这背后是全球首个具身智能机器人真机强化学习技术的突破。这项技术让机器人学习新技能的时间从数小时缩短至十几分钟,任务完成率达到100%,且性能全程不降级。举个例子,传统机器人焊接汽车底盘时,若零件尺寸偏差1
发布:2025-12-08

12-08 2025
工业机器人技术新发展
在深圳某新能源汽车工厂里,12台协作机器人正与工人并肩作业,它们不仅能精准识别零件型号,还能通过力反馈系统感知人类操作力度,实现“你抬我扶”的默契配合。这不是科幻电影场景,而是2025年中国制造业的真实写🍑PG电子官网照。据国际机器人联合会最新数据,中国工业机器人密度已达每万名工人470台,超越德国、日本跃居全球第三,
发布:2025-12-08