PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的专业性高新技术企业。公司资力厚、技术先进,产品远销泰国、越南、菲律宾等东南亚国家和地区。

自有软件专利通过知识体系贯标认证,高新技术企业自主研发团队,可根据客户需求非标定制。获得各项专利30余项。

您可以第一时间了解到PG电子的最新动态,与您分享行业的最热资讯,时刻在为您服务。在焊接通用设备、焊接结构件、工装夹具、焊接自动化设备及控制方面积累了丰富的实践经验。
秉持着“树立一种优质形象:优质服务是生命,客服满意是目的”的经营理念,实施差异化战略,在细分市场发力,为客户提供高品质的工业机器人和智能制造解决方案。PG电子工业机器人一直倾心打造好的品质,竭力追求贴心的服务。
PG电子工业机器人有限公司
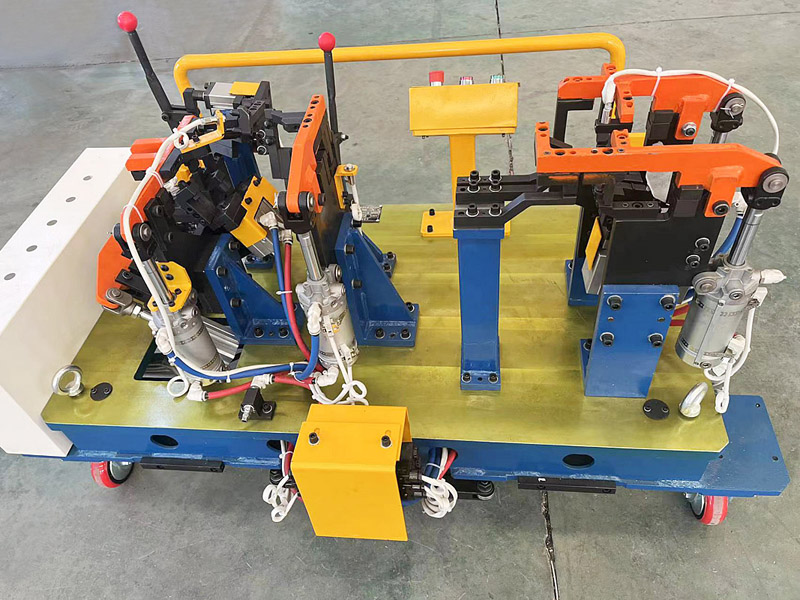
PG电子工业机器人有限公司坐落于江苏常州天宁区,专业从事焊接系统的开发与制造、焊接切割技术咨询与服务的 专业性高新技术企业。公司主要产品有OTC焊接机器人、OTC焊机,焊接机,工装,夹具,检具,非标自动化焊接设备、机器人应用系统等,
发布:2025-03-08 浏览:474
在现代工业自动化领域,工业机器人路径规划算法扮演着至关重要的角色。这一技术旨在帮助机器人在复杂的工作环境中高效、安全地完成各项任务。本文将深入探讨工业机器人路径规划算法的几个主要方面,结合最新热点话题,为读者提🅿PG电子官网供有价值的科普信息。

工业机器人路径规划算法,简而言之,就是为机器人在工作空间中找到一条从起点到终点的最优或可行路径。这一过程需要综合考虑机器人的动态模型、传感器信息、障碍物分布以及路径的安全性、高效性和能耗等因素。路径规划算法的重要性不言而喻,它直接关系到机器人的工作效率、安全性和智能化水平。
据统计,在采用先进路径规划算法的工业生产线中,机器人的工作效率可提高20%以上,同时显著降低故障率和维护成本。这一数据充分说明了路径规划算法在提升工业机器人性能方面的关键作用。
1. **Dijkstra算法**:这是一种经典的最短路径算法,适用于静态环境下的路径规划。它以图的起点为源点,逐层搜索和更新最短路径树,直到找到从起点到终点的最短路径。Dijkstra算法的时间复杂度为O(n^2),在处理大规模环境和复杂障碍物时展现出卓越的效率和鲁棒性。
2. **A*算法**:A*算法是一种启发式搜索算法,通过引入代价函数来评估起点到终点的预计成本,并采用最佳优先策略。这种算法显著减少了需要搜索的节点数量,从而提升了搜索效率。在二维栅格地图上,A*算法能够快速找到代价值最小、路程最短的路径。
3. **RRT算法**:Rapidly-exploring Random Trees(RRT)算法是一种基于树形结构的随机搜索算法,适用于非凸的动态环境下的路径规划。它通过随机地产生树节点扩展,不断地构建树形结构,得到一条符合要求的路径。RRT算法在复杂环境中表现出色,无需预先了解环境的完整信息,并能有效处理障碍物和未知区域。
近年来,随着人工智能和机器学习技术的飞速发展,端到端学习在工业机器人路径规划中的应用🈸成为了一大热点。这种方法直接从传感器输入到行为输出进行学习,无需显式建模环境或规划中间步骤。端到端路径规划模型输入传感器数据,输出规划(预测)的路径点,然后用控制算法将这些点转化成机器人的控制信号。
此外,集群规划也是当前工业机器人路径规划领域的一个研究重点。在集群规划中,多个机器人需要协同工作,完成复杂任务。这要求机器人之间有高效的通信机制和协调策略,以避免碰撞、优化整体路径和任务分配。集中式轨迹规划与高频率分布式避碰控制的结合,为集群规划提供了新的解决方案。
在实际应用中,工业机器人路径规划算法还面临着诸多挑战。例如,在工业制造领域,机器人需要在狭窄且布满各种设备的生产空间中精准地移动,不仅要避免与周围设备发生碰撞,还要确保能够按照生产流程的要求快速、准确地到达指定位置。这就要求路径规划算法具备高度的灵活性和适应性。
为了应对这些挑战,研究人员正在不断探索新的算法和技术。例如,基于凸优化的全局路径规划算法通过精细划分环境中的可通行安全区域,并提出专为凸优化松弛方法设计的路径求解器,实现了多维度场景下的实时路径规划和最优解的获取。这种算法在计算时间上显著优于基于采样的路径规(guī)划(huà)算(suàn)法。
综上所述,工业机器人路径规划算法是工业自动化领域的关键技术之一。通过深入了解和应用这些算法,我们可以显著提升机器人的工作效率、安全性和智能化水平。未来,随着人工智能、机器学习等技术的不断发展,路径规划算法将迎来更多的创新和应🍓PG电子官网用。
展望未来,我们可以期待更加高效、智能的路径规🔑划算法的出现,为工业机器人提供更加精准、灵活的导航和移动能力。同时,我们也应该关注算法在实际应用中的挑战和问题,不断探索新的解决方案和技术手段,以推动工业自动化领域的持续发展和进步。
通过本文的介绍和分析,相信读者已经对工业机器人路径规(guī)划(huà)算(suàn)法(fǎ)有(yǒu)了(le)更(gèng)加(jiā)深(shēn)入(rù)的(de)了(le)解(jiě)和(hé)认(rèn)识(shi)。希(xī)望(wàng)这(zhè)些(xiē)信(xìn)息(xi)能(néng)够(gòu)为(wèi)读(dú)者(zhě)在(zài)实(shí)际(jì)应(yīng)用(yòng)中(zhōng)提(tí)供(gōng)有(yǒu)益(yì)的(de)参(cān)考(kǎo)和(hé)借(jiè)鉴(jiàn)。

12-10 2025
1. 工业机器人培训新选择
发布:2025-12-10
12-10 2025
今日科普|工业机器人操作指南
提到工业机器人,很多人脑海中🎭PG电子官网会浮现出科幻电影里机械臂精准焊接、搬运的场景。但你知道吗?这些“钢铁猛兽”早已渗透到我们生活的方方面面——从汽车制造到3C电子,从物流仓储到医疗手术,甚至在2025年爆火的人形机器人热潮中,工业机器人技术仍是底层核心。根据国际机器人联合会(IFR)最新数据,2025年中国工
发布:2025-12-10
12-08 2025
知名工业机器人品牌盘点
说到工业机器人,很多人第一反应可能是汽车工厂里“咔咔”焊接的机械臂,或是物流仓库里“嗖嗖”搬运货物的移动底盘。但你知道吗?2025年的工业机器人早已不是“只会重复动作的铁疙瘩”,而是能自主决策、灵活适应、甚至能“看懂”复杂场景的“智能助手”。根据麦肯锡《全球工业自动化发展白皮书》,2025年人形机器人的🏆PG电子官网场
发布:2025-12-08

12-08 2025
今日科普|中国工业机器人发展路
如果用一句话形容中国工业机器人的发展,那一定是“十年狂飙,一朝蜕变”。从2025年产量3.3万台到2025年55.64万台,10年增长超15倍——这组数据背后,是中国从“世界工厂”向“智造强国”的跨⚪PG电子官网越。但更值得关注的是,2025年行业增速依然强劲:前5个月全国高技术制造业增加值同比增长9.5%,工业机器人
发布:2025-12-08
12-08 2025
工业机器人技术新突破
2025年11月,上海某汽车工厂里,一台六轴工业机器人正用机械臂抓取零件进行焊接。与传统机器人需要提前编程不同,这台机器人通过具身智能技术,在操作过程中实时感知环境变化,自主调整焊接角度和力度——这背后是全球首个具身智能机器人真机强化学习技术的突破。这项技术让机器人学习新技能的时间从数小时缩短至十几分钟,任务完成率达到100%,且性能全程不降级。举个例子,传统机器人焊接汽车底盘时,若零件尺寸偏差1
发布:2025-12-08

12-08 2025
工业机器人技术新发展
在深圳某新能源汽车工厂里,12台协作机器人正与工人并肩作业,它们不仅能精准识别零件型号,还能通过力反馈系统感知人类操作力度,实现“你抬我扶”的默契配合。这不是科幻电影场景,而是2025年中国制造业的真实写🔻PG电子官网照。据国际机器人联合会最新数据,中国工业机器人密度已达每万名工人470台,超越德国、日本跃居全球第三,
发布:2025-12-08